G. Schgör (Lugl. 2004,
agg. Nov. 2005)
La simulazione con calcolatore nella
didattica degli amplificatori
operazionali
Sommario
Vengono illustrati
programmi per calcolatore che illustrano i principi e le più importanti
configurazioni applicative degli amplificatori operazionali.
Iniziando dai circuiti di amplificazione a
transistor, viene infatti prima
simulata la struttura dell’operazionale per poi passare alle configurazioni
lineari e non-lineari di questo componente fondamentale per l’elettronica
analogica.
Una serie di programmi è poi dedicata alle risposte
in frequenza degli amplificatori retroazionati, per una più immediata
comprensione degli effetti che la
retroazione produce sul comportamento dell’amplificatore stesso.
Un’altra serie ne mostra le principali applicazioni
pratiche, dai filtri al calcolo analogico e alla regolazione automatica.
La rassegna di questi programmi si conclude con la simulazione di anelli di regolazione automatica di tipo proporzionale(P), proporzionale-integrale (PI) e proporzionale-integrale-derivativa (PID), con possibilità di associare le risposte in frequenza (diagrammi di Bode) con le risposte nel tempo dell’anello stesso, permettendo così progettazione e verifica delle prestazioni del regolatore.
Ad ogni modo, i programmi qui citati sono scaricabili gratuitamente, clickando sul singolo riferimento.
I programmi sono degli eseguibili da VisualBasic (.exe) e non richiedono particolari requisiti per la loro esecuzione in ambiente Windows (salvo la presenza dell’interprete VBRUN300.dll, normalmente già esistente nel software di base del computer).
Premesse
Gli amplificatori operazionali, apparsi alla fine
degli anni sessanta, hanno rivoluzionato l’elettronica analogica, introducendo
possibilità di calcolo che permisero di risolvere brillantemente gran parte dei
problemi posti dall’evoluzione dell’automazione industriale e delle comunicazioni.
Giustamente quindi questi elementi vengono
illustrati nei libri di testo dei corsi di elettronica delle nostre scuole,
anche se gli indirizzi attuali dell’elettronica sono sempre più orientati a
soluzioni ‘digitali’ anziché analogiche.
Questa considerazione però dovrebbe portare ad un
diverso modo di insegnare
l’elettronica, non insistendo per esempio in inutili particolari e non facendo sfoggio di altrettanto inutile
trattazione ‘matematica’ , spesso fine a
sé stessa e che penso non lasci
traccia negli studenti alla fine degli studi.
La proposta alternativa è una più immediata forma di
comprensione, oggi permessa dall’uso del calcolatore, basata sulla ‘simulazione’ del comportamento dell’elemento
inserito in una particolare configurazione circuitale, una sorta di
‘laboratorio virtuale’ in cui con estrema facilità si comprendono gli effetti
delle variazioni introdotte (cambi di parametri o di configurazione).
Naturalmente l’utilizzo didattico di tali programmi
richiede la guida da parte di un Docente, che ne illustri i principi e che indichi agli studenti i più
opportuni obiettivi di ricerca, a meno
che non si sviluppino corsi in rete per permettere anche un uso autodidattico
dei programmi stessi.
1)
Dal
transistor all’amplificatore
operazionale
Il primo programma
considerato (trans.exe)
richiama definizioni di transistor ed il concetto di amplificazione di
corrente(b), illustrando poi la
classica configurazione ad emettitore comune, come amplificatore di tensione.
Di questa configurazione viene dato un elementare
circuito equivalente, che permette di capire i concetti di polarizzazione e
dell’amplificazione di un segnale, con possibilità appunto di ‘sperimentarne’
il funzionamento.
Così vengono anche presentate le configurazioni ad
‘emitter follower’ e a
’generatore di corrente’, propedeutiche per l’introduzione dell’amplificatore
differenziale, cioè della base su cui è stato sviluppato l’amplificatore
operazionale.
Come si potrà notare dall’uso
di tali programmi, la didattica è ridotta all’essenziale, ma l’osservazione del
funzionamento di questi circuiti permette una facile assimilazione dei concetti
fondamentali, quindi un apprendimento più concreto e duraturo.
2)
Impieghi
dell’amplificatore operazionale
Il secondo programa (opamp.exe) permette di chiarire il ruolo del ‘guadagno’
dell’amplificatore per raggiungere la
pratica parità del segnale d’uscita rispetto a quello d’ingresso (a
parte il segno).
Questo fa capire in modo elementare la funzione
di ‘moltiplicatore per una costante’
intrinseca nella configurazione di base dell’amplificatore reazionato e dato
dal rapporto fra resistenza d’ingresso e quella di retroazione.
Così risulta
anche evidente la possibilità di ‘somma’ di due o più segnali.
Concettualmente più complessa è la configurazione per ‘integrare’ un segnale, ma qui le difficoltà
possono derivare da insufficienti basi matematiche o di elettrotecnica (comportamento circuitale del condensatore),
non certo dalla comprensione del circuito.
L’applicazione si riferisce solo al cambiamento
della costante d’integrazione (RC), ma è sufficiente per far capire l’effetto
di questa sull’andamento dell’uscita con segnale d’ingresso costante.
L’ultima voce di questo programma riporta
un’immediata applicazione degli amplificatori operazionali nello studio del
comportamento dinamico di una
configurazione meccanica (un peso
appeso ad una molla) sottoposta ad una forza.
Pur essendo anacronistico l’uso di un ‘simulatore
analogico’, questo è un buon esempio di impiego degli amplificatori
operazionali nel calcolo, con la tipica soluzione di un’equazione differenziale
del secondo ordine, permettendo almeno di capire le possibilità di
applicazione, prima dell’avvento dei calcolatori elettronici.
Ritorneremo comunque sull’argomento, con una più
recente serie di programmi, che illustra anche il caso di soluzione simultanea
di equazioni lineari.
3) Impieghi non-lineari degli amplificatori
operazionali
Un altro importantissimo campo di applicazioni
riguarda il trattamento non-lineare dei segnali ed un programma apposito (Nolin.exe) ne illustra i principali
esempi.
Il primo esempio riguarda la simulazione del
comportamento del diodo ideale, che permette un facile approccio al concetto di
non-linearità fra segnali di ingresso e di uscita (compresa la saturazione,
quasi mai evidenziata nei libri di testo).
Certamente più
notevole è la generazione di funzioni speciali, quali quella quadratica
del secondo circuito: la visualizzazione del cambiamento di pendenza, cioè del
rapporto fra uscita ed ingresso, è evidenziato dalla simulazione con
l’indicazione del punto di lavoro che si sposta lungo le rette che approssimano la funzione.
Ancora più spettacolare è la simulazione del ‘rilevatore di soglia’ di un segnale, che
permette di cogliere immediatamente i concetti non banali di ‘valore di soglia’ e di ‘zona morta’ (cioè i
limiti di intervento del bistabile),
con la possibilità di variare tutti i parametri che ne determinano il funzionamento.
Dello stesso livello di importanza è il circuito astabile, cioè il classico
oscillatore ad onda quadra.
Anche in questo caso, dopo la presentazione del
principio di funzionamento, è simulata la
generazione non solo della frequanza variabile, ma viene considerata
anche la possibilità di variare il rapporto impulso/ pausa dell’onda quadra generata.
Chiude la serie di circuiti basilari
la configurazione ‘monostabile’,
cioè il tipico circuito di ritardo che viene utilizzato anche nei sistemi di
automazione a logica sequenziale.
4) Risposta in frequenza degli amplificatori
operazionali retroazionati.
La maggior parte dei libri di testo presenta il
comportamento dei vari possibili modi di retroazione con la corrispondente
funzione di trasferimento, cioè con l’espressione dell’operatore s di Laplace.
Questo è naturalmente corretto, ma richiede una
capacità di astrazione matematica non comune, e sembra quindi preferibile un
approccio che possa essere più intuitivo per la maggior parte degli studenti.
Il ricorso alla risposta in frequenza, nella forma
di diagrammi di Bode, è certamente un
modo per favorirne la comprensione (formalmente si tratta di sostituire jw all’operatore s e di trattare l’espressione come numero
complesso, funzione della pulsazione w, riportandone l’andamento
in diagrammi logaritmici).
Concettualmente l’interpretazione è elementare: il
diagramma di Bode rappresenta l’andamento del rapporto fra segnale sinusoidale
d’uscita rispetto quello, sempre sinusoidale, di ingresso, andamento in funzione della frequenza dei
segnali (f = w/2p).
Una comprensione profonda del diagramma di Bode (che
a rigore dovrebbe essere sempre completato con il diagramma delle fasi, spesso
invece ignorato), fornisce quindi gli elementi sufficienti a prevedere il comportamento
di qualsiasi configurazione, ed è questo che viene appunto illustrato nei
programmi di questa serie di simulazioni (OAINDX).
Un’ulteriore segnalazione è che tali programmi, di
più recente realizzazione, utilizzano i progressi fatti dai calcolatori negli
ultimi anni, quali una maggior dimensione dello schermo e la possibilità di
commenti audio, che facilitano ulteriormente la presentazione e la comprensione
degli argomenti trattati.
Entrando più in dettaglio nei programmi di questa
serie, si evidenzia la semplicità della risposta (costante al variare della
frequenza) della configurazione proporzionale: è un altro modo di vedere la
funzione delle moltiplicazione di un segnale per una costante, già incontrata
all’inizio.
Questo però dà la possibilità di familiarizzarsi con
l’interpretazione del diagramma di Bode (soprattutto con il guadagno in dB).
Più impegnativa è la comprensione della
configurazione integratrice (con guadagno tendente all’infinito per frequenze
tendenti a zero, cioè con segnali costanti): l’interpretazione della
‘pulsazione integrativa wi=1/RC’ (passaggio a 0 dB, cioè a guadagno =1), è fondamentale per afferrare l’essenza del
comportamento dell’integratore, e la possibilità di far variare a piacere
questo parametro (agendo sul valore di R), ne rende evidente il significato.
Così è anche per la configurazione derivatrice,
duale della precedente, con il semplice scambio di posizione di R e C.
Di maggior importanza pratica è il caso della
configurazione proporzionale-integrale (PI), in cui si devono considerare
fondamentali i 2 parametri wi e wp: anche qui la possibilità
di variazione dei parametri e l’immediato aggiornamento del relativo diagramma
di Bode, rende intuitivo il legame fra
le variazioni dei parametri e l’effetto sull’andamento della ‘risposta in frequenza’.

Per completezza, viene anche considerato il caso
proporzionale-derivativo (PD). Anche se di minor importanza pratica, è
interessante esaminare questo caso,
soprattutto nella variante di limitazione dell’azione derivativa, in quanto
propedeutica al più completo PID (che verrà dettagliatamente esaminato più
avanti).
Termina questa serie invece la configurazione che
simula il comportamento di una ‘costante di tempo’.
Questa configurazione può essere vista sia come un
mezzo per simulare il comportamento di un sistema che viene posto in un anello
di regolazione, sia come la forma più semplice di filtro passa-basso.
5) Esempi di applicazioni pratiche degli
amplificatori operazionali retroazionati.
In questa serie (
APPINDX) vengono evidenziati i principali campi applicativi
delle configurazioni finora viste.
Si inizia da
un doppio filtro, un passa-alto e un
passa-basso, entrambi a 2 stadi, con
indicazione sia dei relativi diagrammi di Bode, sia dell’effetto che questi producono su un particolare segnale (50 Hz, con terza armonica).
Anche i programmi di questa serie sono illustrati da
un commento audio, che guida alla comprensione
e ne suggerisce l’utilizzo.
Mi limito quindi a citare qui l’esistenza dei
programmi, senza entrare nei dettagli.
L’esempio dei filtri citato è importante per capire
i fondamenti ma, come indicato, le prestazioni
risultano piuttosto scarse, se non si ricorre ad altri tipi di
configurazioni più complesse: i filtri a risonanza.
Il secondo caso esamina quindi i principi su cui si basano questi ultimi, per introdurre poi (terzo caso) i filtri cosiddetti ‘universali’.

La figura illustra il caso particolare del filtro universale in configurazione Passa Banda, con possibilità di selezionare i valori di frequenza centrale e di selettività (Q).
Si sottolinea comunque che la trattazione succinta di questi sia sufficiente a capirne
l’essenza: una trattazione più particolareggiata come quella che si trova in
ponderosi libri di testo, risulta del
tutto inutile, vista la già citata tendenza dell’elettronica moderna alle
soluzioni digitali (specialmente per i filtri), che si basano su tutt’altri
principi e che garantiscono prestazioni nettamente superiori alle soluzioni
analogiche, sia per precisione che stabilità.
Con lo stesso criterio vengono poi illustrate
applicazioni di calcolo analogico (quarto e quinto caso), con lo scopo di far capire in che modo fosse possibile,
prima dell’avvento dei calcolatori elettronici (almeno di quelli a basso
costo), risolvere problemi anche complessi di automazione: soluzioni quindi ora
obsolete, ma di notevole interesse concettuale.
6)
Gli
amplificatori operazionali nella regolazione automatica
Sempre riferendomi ai libri di testo in circolazione
per l’insegnamento dell’elettronica, noto con una certa meraviglia che gran
parte di questi si arresta davanti all’anello di regolazione.
Al massimo si citano i principi, si fa qualche
esempio, ma non viene quasi mai affrontato il problema di progetto e verifica
delle prestazioni di tale anello.
E’ un peccato, perché dopo tanto studio dei singoli
elementi, non si arriva a quella conclusione che darebbe senso a tutto quanto:
gran parte delle applicazioni è tuttora (malgrado la concorrenza digitale)
basata sul classico regolatore analogico, il semplice ed economico PID.
Ma anche se fosse obsoleto, i suoi principi
andrebbero comunque assimilati e non si
potrebbero affrontare i ben più complicati regolatori digitali, senza queste
basi.
Credo inoltre che sarebbe anche più gratificante per
gli studenti vedere la conclusione pratica di quanto appreso: il progetto di un
regolatore automatico.
A conclusione di questa panoramica di programmi di
simulazione, vorrei quindi presentare l’ultima serie (oareg.exe) relativa appunto all’applicazione degli amplificatori
operazionali nella regolazione automatica.
La simulazione riguarda sia il sistema regolato (a 1
o 2 costanti di tempo), sia il regolatore vero e proprio, che può essere di
tipo PI, PD o PID, naturalmente chiusi
ad anello.
Di questo programma vengono presentate due schermate
(fig.1 e 2), per mostrarne la potenzialità di utilizzo (per gli altri non è
stato qui fatto, perché avrebbe richiesto decine di figure).
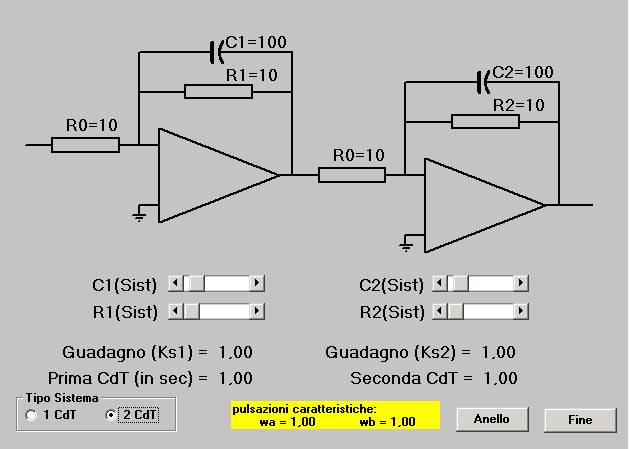
Schermata dal programma di simulazione degli amplificatori operazionali
nella regolazione automatica: simulazione del sistema regolato (a 2 costanti di
tempo).
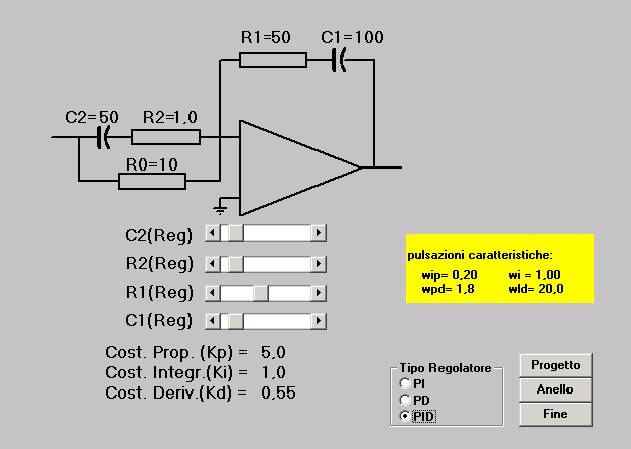
Schermata dal programma di simulazione degli amplificatori operazionali
nella regolazione automatica: simulazione del regolatore (PID).
Le spiegazioni della Guida, contenuta nel programma
stesso, dovrebbero essere sufficienti
alla sua utilizzazione: in effetti si tratta di stabilire prima le costanti di
tempo del sistema da regolare, di scegliere il tipo di regolatore
e di determinarne i parametri.
Attivando poi il tasto ‘Bode’, si avrà la risposta
(a ciclo aperto) dell’anello: da questo andamento si dovrebbero prevedere le prestazioni ottenibili con la
effettiva chiusura dell’anello stesso (ed in questo consiste l’addestramento del progettista),
prestazioni comunque verificabili con il tasto ‘gradino’ che applica
all’ingresso dell’anello un riferimento a gradino, disegnando poi l’effettivo
andamento nel tempo del segnale regolato (uscita).
La cosa non è però così semplice, ed ottenere un
andamento dell’uscita non troppo oscillante e tuttavia nemmeno troppo lenta, è
appunto l’arte del progettista (a meno di non ricorrere ai metodi di calcolo
automatico dei parametri ottimi, disponibili nel programma stesso).
Credo (almeno mi auguro) che un po’ di esercitazioni
su questa simulazione metta in grado chiunque perlomeno di capire il procedimento di messa a punto di un
regolatore automatico, indispensabile premessa, come già detto, alla
comprensione degli attuali ben più complessi regolatori digitali.